随着科技的进步和智能家居的普及,扫地机器人作为家庭清洁的新宠,正逐渐走进千家万户。它不仅能够减轻人们的家务负担,还能在复杂多变的家庭环境中实现高效清洁。
那么,扫地机器人究竟是如何实现这一切的呢?本文将深入解析扫地机器人的关键部件,并对比其主要导航系统技术,带您一探究竟。
扫地机器人关键部件解析
常见的扫地机由核心主控系统、传感器与控制系统、清扫系统、动力供应系统等组成,这些关键部件共同协作,使扫地机器人能够在家中自主导航、智能避障并高效清洁。随着技术的不断发展,我们可以期待扫地机器人在未来拥有更多创新和改进,为我们的生活带来更多便利。
n25daxgv0iw6403909058.jpg

核心主控系统
芯片是扫地机器人的核心所在。它如同机器人的“大脑”,负责处理各种传感器收集到的数据,并作出相应的决策。
当下的扫地机主控芯片基本都带有高效的运算能力,也就是我们平常说的NPU,它可以赋能扫地机器人在各种复杂环境下都能实现自主导航、智能避障以及精准清扫。
31m1uk14icg6403909158.png

而在目前的国内市场上,全志科技、兆易创新等企业是主控芯片的主要供应商。其中,全志科技的MR/R系列芯片已经在扫地机器人、四足机器狗等产品上得到了广泛应用,其拥有的丰富音视频和运动驱动接口,为机器人提供了强大的性能支持。
传感器与控制系统
传感器是扫地机器人的“感知器官”,通过红外、超声波、激光等多种传感器,机器人能够感知周围环境,如障碍物、地面材质等信息。
控制系统则是机器人的“大脑”,负责处理传感器收集的数据,并作出相应的决策,如调整行进路线、调节清扫强度等。传感器与控制系统的协同工作,使得扫地机器人能够智能适应各种复杂环境。
清扫系统
清扫系统是扫地机器人的核心功能部件,包括边刷、主刷、吸尘口等。边刷负责将边角处的灰尘扫入清扫区域,主刷则通过高速旋转将灰尘、杂物扫入吸尘口。
zhfczxhzum06403909258.png

吸尘口连接着吸尘器,将扫入的灰尘吸入集尘箱,完成清洁过程。高效的清扫系统需要具备强大的清洁能力,同时能够应对不同类型的地面和污渍。
动力供应系统
电机是扫地机器人的“心脏”,它提供了机器人移动和清扫所需的动力。优质电机能够提供稳定的动力输出,保证机器人在不同地形上的运行流畅。
而电池则是扫地机器人的“能量源泉”,决定了机器人的续航能力和使用寿命。目前,扫地机器人多采用锂电池,其能量密度高、自放电率低,为机器人提供了持久稳定的电力支持。
主要导航系统技术对比
早期的扫地机器人,其清扫路径多呈随机状态,主要通过内置的陀螺仪对物品进行粗略定位。这种方法的局限性显而易见:扫地机器人容易在同一区域反复清扫,而另一些区域则可能完全遗漏,导致整体清扫效率偏低。
不过,随着技术的不断进步,从2010年开始,扫地机器人的使用体验迎来了显著的改善。背后的推动力主要是导航系统和路径规划技术的持续创新。
在导航系统方面,扫地机器人经历了从陀螺仪导航到更为先进的LDS激光导航和vSLAM视觉导航的演变。这些先进技术的引入,不仅大幅提升了扫地机器人的定位精度,还使其能够构建更为精准的室内地图,从而实现更高效、更有针对性的清扫。
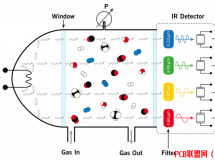
红外线导航
红外线导航是早期扫地机器人常用的技术,它通过发射和接收红外线信号来判断与障碍物的距离。这种技术成本较低,但受光线和环境影响较大,如在光线不足或复杂纹理的地面上,导航精度会受到影响。
超声波导航
超声波导航通过发射超声波并接收其反射波来探测障碍物,具有较高的抗干扰能力和穿透能力。不过,超声波导航的反应速度相对较慢,对于快速变化的环境适应能力有限。
激光导航(SLAM)
激光导航是目前扫地机器人最为主流的导航技术,它通过激光雷达扫描周围环境,构建精准的地图,并通过SLAM(Simultaneous Localization and Mapping)算法实现机器人的自主定位与导航。
uujcwdxc3fz6403909358.jpg

激光导航精度高、稳定性好,且能够在黑暗环境中正常工作,是高端扫地机器人的首选技术。
视觉导航
视觉导航利用摄像头捕捉环境图像,通过图像处理技术识别障碍物和路径。这种技术具有高度的灵活性和适应性,能够应对复杂多变的环境。然而,视觉导航对计算能力和算法要求较高,成本也相对较高。
udlufvub55o6403909458.jpg

总之,扫地机器人的关键部件和导航系统技术共同决定了其性能和智能程度。随着技术的不断进步,未来的扫地机器人将更加智能、高效,为我们的生活带来更多便利。在选择扫地机器人时,我们应根据自己的需求和环境特点,挑选适合的机器人,让科技为我们的生活增色添彩。
end
一口Linux
关注,回复【1024】海量Linux资料赠送
精彩文章合集
文章推荐
?【专辑】ARM?【专辑】粉丝问答?【专辑】所有原创?【专辑】linux入门?【专辑】计算机网络?【专辑】Linux驱动?【干货】嵌入式驱动工程师学习路线?【干货】Linux嵌入式所有知识点-思维导图 | 




















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡