|
2265| 2

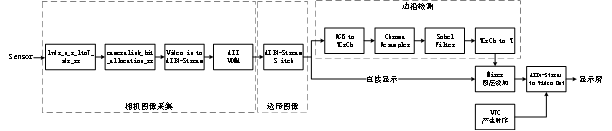
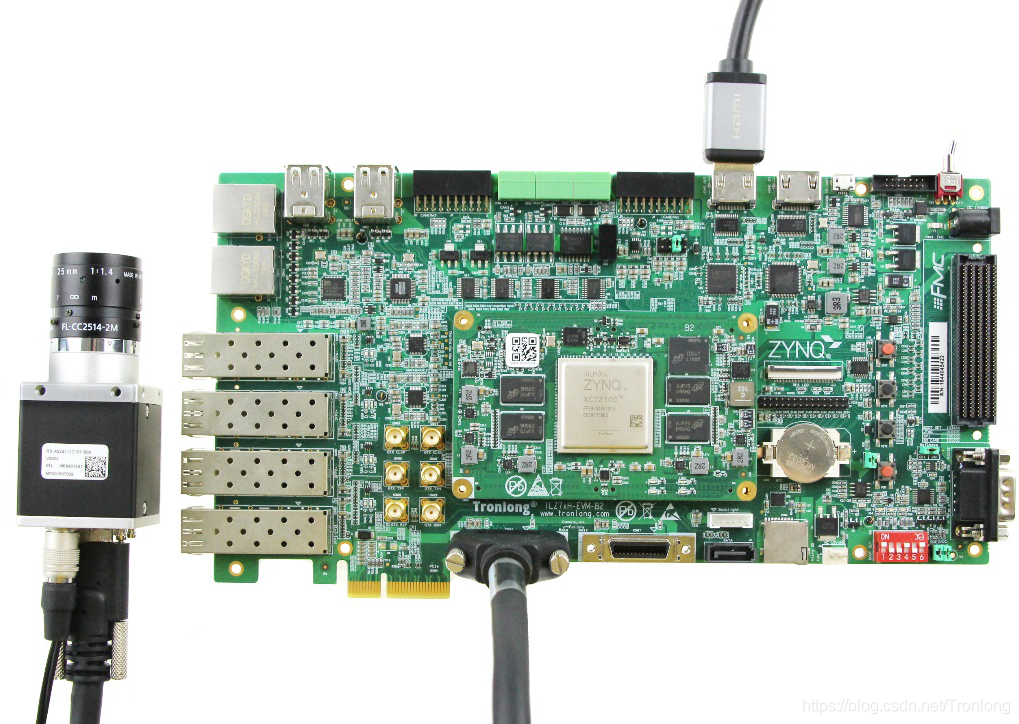
创龙基于ZYNQ的CameraLink图像采集与边缘检测开发详解 |

| ||||||
|
嵌入式DSP、ARM、FPGA多核技术开发,学习资料下载:http://site.tronlong.com/pfdownload
|
||||||












Copyright ©2015-2022 长沙市凡亿教育科技有限公司 Powered by©Discuz! 技术支持:凡亿教育 ( 湘ICP备2024059722号 )





 窥视卡
窥视卡






 置顶卡
置顶卡 变色卡
变色卡