本文主要参考了TIDA-010031参考设计,分析下ADC采样积分方波无感控制的原理,方使大家更好地完成类似的方案设计。2 W; y- B" Z7 B+ x4 n' g
1.下面是典型的三相BLDC电机控制框图
$ A% P1 h: w4 u+ o _: x: V4 e三个半桥驱动BLDC无刷电机,检测低边总线电流0 |4 ]! _( ]5 R7 q9 c4 _0 J. @
1rtueiewefa6408170804.png

( E' F; |. C- m! p2.典型的BLDC电机相电流和反电动势波形图分析从波形上看,每60度电角度,只有两个半桥有驱动电压输出,另外一个半桥上下管全关,这个相电压是悬浮态BLDC电机运行后,相线都有反电动势。& d. W& f" a4 B' r
电机反电动势来源于电机转子旋转引起磁通的变化,而磁通的变化在定子绕组上会产生感应电压对同一个电机来说,反电动势峰值跟电机转速几乎是固定的比例。
. {" F/ }# d8 E" X) v' E5 K, C% ?6 B
lj5l4koymtw6408170904.png

8 P5 }: t* M1 \: e; q1 D0 K' s( l3.反电动势过零点到峰值的反电动势电压和时间的积分
5 |* f- o0 `5 W3 T7 @( E
1z2wkvddpkl6408171005.png
 1 |9 f! I" D1 f2 g/ _) V8 p- p
1 |9 f! I" D1 f2 g/ _) V8 p- p
根据上面对反电动势峰值跟转速(电频率)几乎成固定比例的描述,设定Kv=Vm/f(Volt/Hz)。Vm为反电动势峰值,对于同一个电机,我们可以认为Kv几乎不变。: v6 {+ w; |4 i' H0 d) X; j
以上图左边的蓝色区域为例,该区域(反电动势过零点时刻到下一次换相点时刻之间的区域)的电角度是30度,也就是电角度(360度)的1/12。
`1 ~4 g- o% \2 g# R7 c m设当前电机电频率为f单位为Hz。
* g: x# O' T& w7 c反电动势的峰值电压为Vm=Kvf,单位为伏特。
9 \& y# o. W% ]0 H/ o3 z设反电动势从center tap vale到最大值的时间为t1,而
; o5 }" U! `2 [6 x Q6 C6 D3 ?
33oezsogifm6408171105.png
 : m# Y5 }9 _- K! ]$ h, i) b
: m# Y5 }9 _- K! ]$ h, i) b
那么蓝色积分区域的积分值就等于蓝色三角形的面积:1 ^( P) P. b& p2 m3 s
ujl2zjkrjtm6408171205.png

1 \" r/ q: H8 A0 Y/ r- s! C! y3 Y可以看到,积分结果是Kv值的,因此积分结果也是几乎不变的。
( r; {3 N6 L9 ]9 q2 R9 A u6 K- D所以我们可以根据积分的值跟固定阈值作比较来判断换相点。
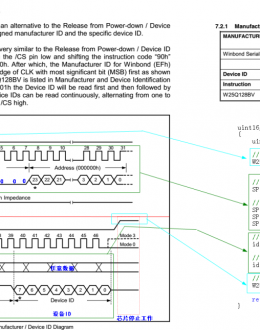
3 ~* U4 ^! k4 L8 j' ?3 ]4.ADC如何采样反电动势
7 a3 n$ z4 o% d" `+ c方波无感BLDC的ADC采样积分控制,电路设计有三相相电压ADC采样电路,每60度电角度区间电机的两相由于半桥有输入电压同时有电感电流,在不增加额外电路的情况下很难获得反电动势电压,而悬浮相由于没有半桥电压输入和电感电流,所以可以从检测该相端电压推导出该相实际的反电动势电压,具体可以看下面的推导,推导过程参考了的参考设计TIDA-01003I
2 j9 S% w" X, }; N& Uhttp://www.ti.com/lit/ug/tiduej4/tiduej4.pdf?ts=1588819919326* X/ ?3 Q: W- A8 T' f+ k6 Q
所以如果对这个电机控制方法感兴趣的,可以在T官网上查看该参考设计的软硬件开发资料。1 h! S+ B8 Z. }7 p' P
设计上采用下管常开,上管PWM的策略驱动电机。考虑到电机驱动的PWMdiv的大小是变化的,可以根据半桥上管ON的时间长短来决定采样策略,因为如果上管导通时间太短,为了避开MOSFET开通关断的影响,留给采样的时间就变得很少,不利于采样 的准确性.6 O3 M$ N9 d( N/ \1 q& R {1 U" Y
在上管ON的时间比较长时,在上管ON时远离MOSFET开关时刻检测悬浮相的反电动势电压(一般在ON时间的正中间进行采样)。
/ I. w0 Z# [. F: p! J) E1 t
3kt3bgkrpfx6408171305.png

0 i* M6 D1 }; m/ ^5 }$ [5 J/ E$ ?: M此时的驱动逻辑是A相上管导通,B相下管导通,所以有Va=Vm,Vb=0.
( v9 B F7 `; J8 N6 R3 ?3 IEa.Eb.Ec为电机三相反电动势电压,Va,Vb,Vc为三相半桥中点电压,也就是电机三相输入电压。$ Y9 c1 K. S9 q; p
La.Lb,Lc为电机三相相电感,ia. ib.ic为电机三相输入电流,Ra Rb,Rc为电机三相输入电阻(考虑三相电阻相等)Vn为电机三相中点电压。
$ q; k4 {0 J6 l+ h4 O1 w
agddlwhao2a6408171405.png

1 n. y, V8 y9 L5 L3 f( H2 I可以得到当Ec=0,也就是反电动势过零时,也就是说当ADC检测到时,就意味着这个时刻是C相的反电动势过零点, 那么理论上再经过1/12的电周期时间,电机就需要进行换向$ m/ l& ^' I! F7 p
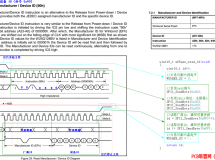
上管ON的时间比较短时,在上管OFF时检测悬浮相的反电动势电压(一般在OFF时间的正中间进行采样).
8 V/ P/ a) [5 `2 ^7 G
1kgk30ky3ob6408171506.png

8 g' j+ i( B+ N/ x此时的驱动逻辑是A相上管关闭,B相下管仍导通,此时A相下管MOSFET体二极管续流,所以有Va=0,Vb=0。
/ j, e/ O7 m" n5 L( t: s
f2m2jqiypvu6408171606.png

M k# d, t# {! |2 e, h8 k7 P, d得到当Ec=0,也就是反电动势过零时,Vc=0,也就是说当ADC检测到Vc=0时,就意味着这个时刻是C相的反电动势过零点,那么理论上再经过1/12的电周期时间,电机就需要进行换向.
$ i: d; D+ |6 b$ E- c) c9 U6 D从上面的分析,我们可以看到,使用ADC采样积分方式进行无感BLDC控制,设计上需要注意以下两点:积分阈值跟电机的反电动势峰值和转速比值相关,可能会随着电机不同而不同,需要针对电机进行调整。上管做PWM驱动的设计下,可以采用不同的ADC采样策略来针对大duy和小dhty的情况,同时反电动势过零点的判断也需要调整电机高速情况下,电频率相对比较高,而ADC积分采样基于PWM开关周期采样的,所以要获得比较准确的换相点,需要比较高的开关频率,如果开关频率比较低,意味着采样速率慢,可能会造成换相延迟比较大,从而影响电机的正常控制。8 G. l, J# J. H. `- d: {' d2 q
[/ol] | 





















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡